

 联系我们
联系我们

自动供料工作站全貌
⑴送料分拣
瓶子由喂料机输送到可灵活转动的两个盘子里,盘子定时进行角度旋转,且方向不同,解决瓶子堆积和DELTA机器人抓取的麻烦。
由于瓶子位置不定,这时候的机器视觉帮助DELTA机器人更好地完成工作。
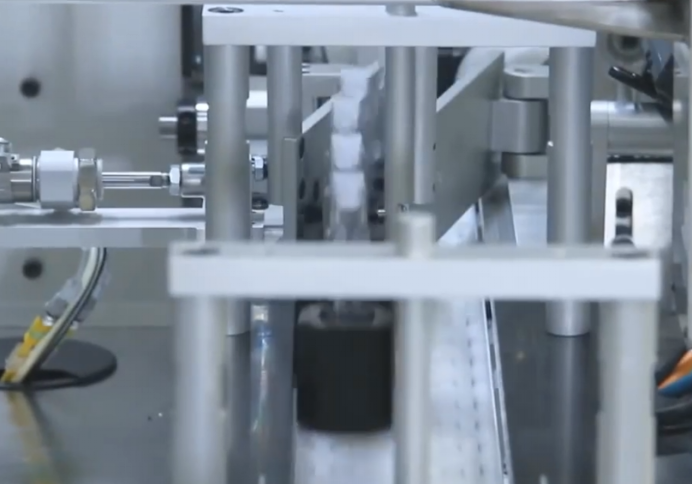
⑵搬运瓶子到输送带
发那科机械手将瓶子搬运到输送带上,准确放到对应的底座上,瓶子输送到下一个操作。
⑶视觉检测,分道输送
通过视觉检测,将瓶子有LOGO的一面统一朝向,快速完成并运送到下一步,进行分道后结束这个自动供料工序。
了解更多机器人请点击:发那科机器人